(T-RO) DLSC: Distributed Multi-Agent Trajectory Planning in Maze-like Dynamic Environments using Linear Safe Corridor
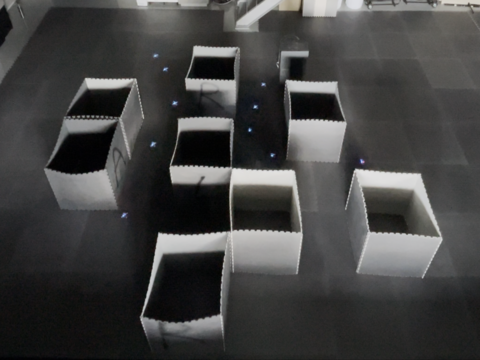
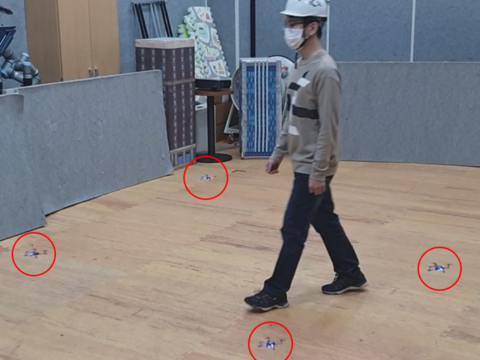
Abstract: This paper presents an online distributed trajectory planning algorithm for a quadrotor swarm in a maze-like dynamic environment. We utilize a dynamic linear safe corridor (DLSC) to construct the feasible collision constraints that can ensure inter-agent collision avoidance and consider the uncertainty of moving obstacles. We introduce mode-based subgoal planning to resolve deadlock faster in a complex environment using only previously shared information. For dynamic obstacle avoidance, we adopt heuristic methods such as collision alert propagation and escape point planning to deal with the situation where dynamic obstacles approach the agents clustered in a narrow corridor. We prove that the proposed algorithm guarantees the feasibility of the optimization problem for every replanning step. We validate the safety and robustness of the proposed algorithm through a hardware demonstration with ten quadrotors and two pedestrians in a maze-like environment.
Bibtex
@ARTICLE{10160164,
author={Park, Jungwon and Lee, Yunwoo and Jang, Inkyu and Kim, H. Jin},
journal={IEEE Transactions on Robotics},
title={DLSC: Distributed Multi-Agent Trajectory Planning in Maze-Like Dynamic Environments Using Linear Safe Corridor},
year={2023},
volume={},
number={},
pages={1-20},
doi={10.1109/TRO.2023.3279903}}