(RA-L) Online Distributed Trajectory Planning for Quadrotor Swarm with Feasibility Guarantee using Linear Safe Corridor
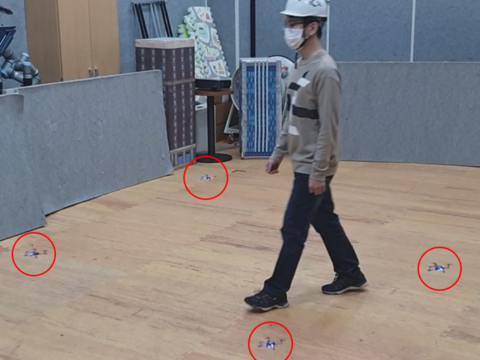
Abstract: This paper presents a new online multi-agent trajectory planning algorithm that guarantees to generate safe, dynamically feasible trajectories in a cluttered environment. The proposed algorithm utilizes a linear safe corridor (LSC) to formulate the distributed trajectory optimization problem with only feasible constraints, so it does not resort to slack variables or soft constraints to avoid optimization failure. We adopt a priority-based goal planning method to prevent the deadlock without an additional procedure to decide which robot to yield. We verified that the proposed method can reach the goal without deadlock in both the random forest and the indoor space, and we validated the safety and operability of the proposed algorithm through a real flight test with ten quadrotors in a maze-like environment.
Bibtex
@article{park2022online,
title={Online distributed trajectory planning for quadrotor swarm with feasibility guarantee using linear safe corridor},
author={Park, Jungwon and Kim, Dabin and Kim, Gyeong Chan and Oh, Dahyun and Kim, H Jin},
journal={IEEE Robotics and Automation Letters},
volume={7},
number={2},
pages={4869--4876},
year={2022},
publisher={IEEE}
}